




















Connected vehicles generate enormous amounts of data, but accessing real-world fleets for testing is costly, time-consuming, and often impractical in the early stages. At Sigma Software, we tackled this challenge by combining cloud-native architectures with simulated telemetry — sourced from both game environments, such as Euro Truck Simulator and Forza Horizon, and a custom hardware stand that mimics key vehicle systems.
System Architecture and Implementation
Challenges, Lessons Learned, and Best Practices
Best Practices for Cloud-Driven Automotive Solutions
This approach enabled us to rapidly prototype predictive maintenance solutions, validate data pipelines, and deliver engaging, real-time demonstrations for stakeholders — all without requiring live fleet access. In this article, we share our practical insights, architectural decisions, and lessons learned, offering guidance for engineers, cloud architects, and innovation leaders exploring Software-Defined Vehicles (SDVs), connected fleets, and scalable predictive analytics.
Developing cloud-based solutions for connected vehicles is both thrilling and challenging. Modern cars generate massive streams of data from brakes, engines, tyres, GPS, and infotainment systems. Making sense of this data in real time requires scalable pipelines, reliable architectures, and flexible integration.
Early-stage projects face several realities:
To navigate these challenges, we chose to simulate vehicle telemetry using both a physical hardware stand and game environments. This strategy allowed us to experiment quickly, validate cloud-first architectures, and demonstrate real-time predictive maintenance — all before having access to live fleets. By doing so, we built a platform that is scalable, modular, and ready for production-grade deployments.
The Fleet Predictive Maintenance R&D project is built on a modular, cloud-native architecture designed to handle telemetry from both real and simulated connected vehicles. Inspired by the Eclipse SDV Fleet Management Blueprint and Microsoft’s Software-Defined Vehicle (SDV) reference model, our setup emphasises scalability, interoperability, and ease of experimentation.
At the heart of our solution is the Azure ecosystem, chosen for its integration capabilities and enterprise-grade scalability. Key services include:
We adopted the Medallion architecture pattern to structure the data pipeline. The Bronze layer captures raw input (e.g. telemetry from Raspberry Pi or driving simulators), while the Silver layer cleans and enriches it. The Gold layer holds curated datasets optimised for ML and visualisation. AutoML automates model training, selection, and hyperparameter tuning, with the resulting model deployed via Databricks Managed MLflow.
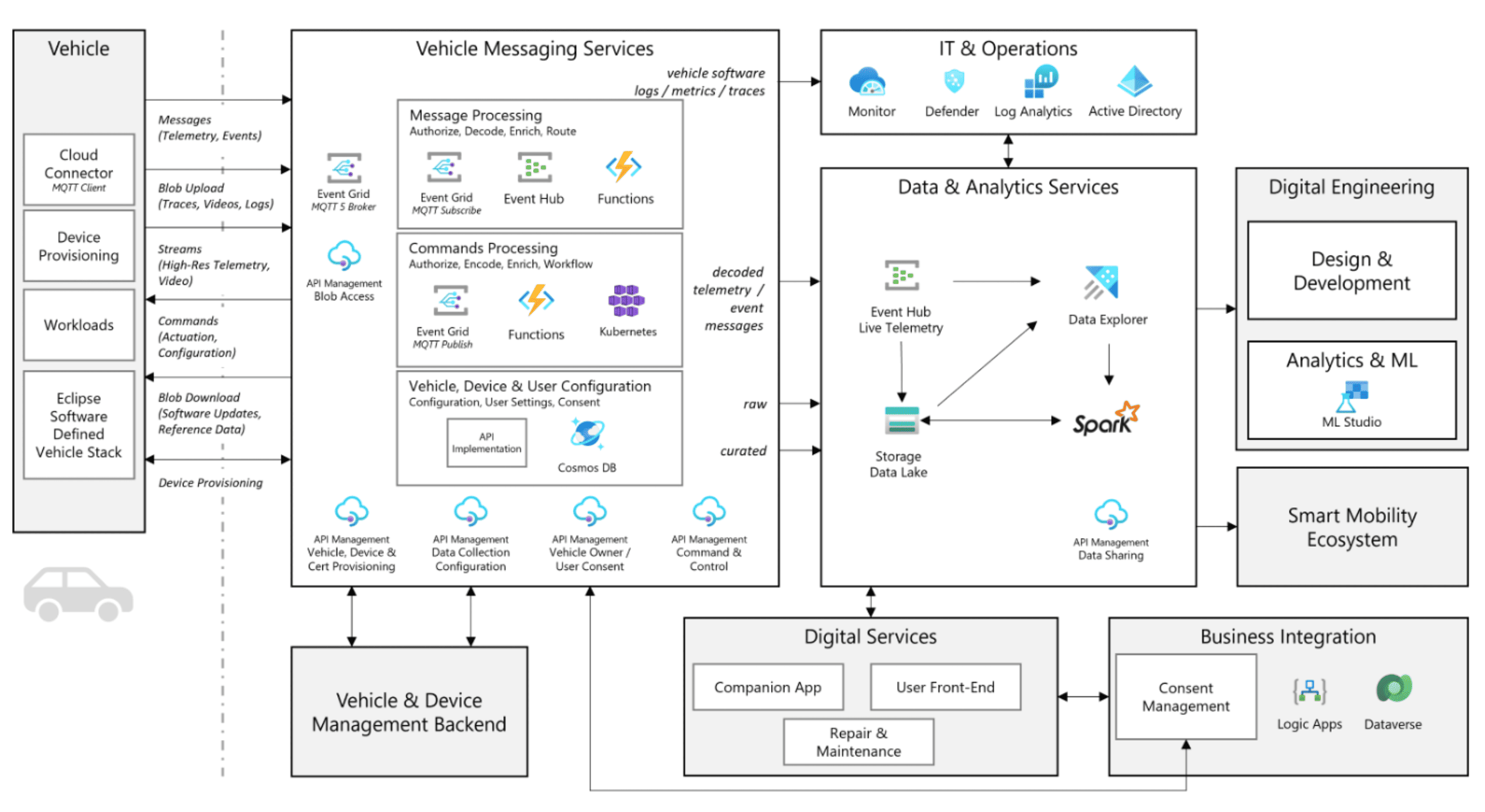
Diagram: End-to-end cloud architecture for processing and analysing connected vehicle telemetry using Azure. The pipeline covers real-time ingestion, storage, ML prediction, and live visualisation.
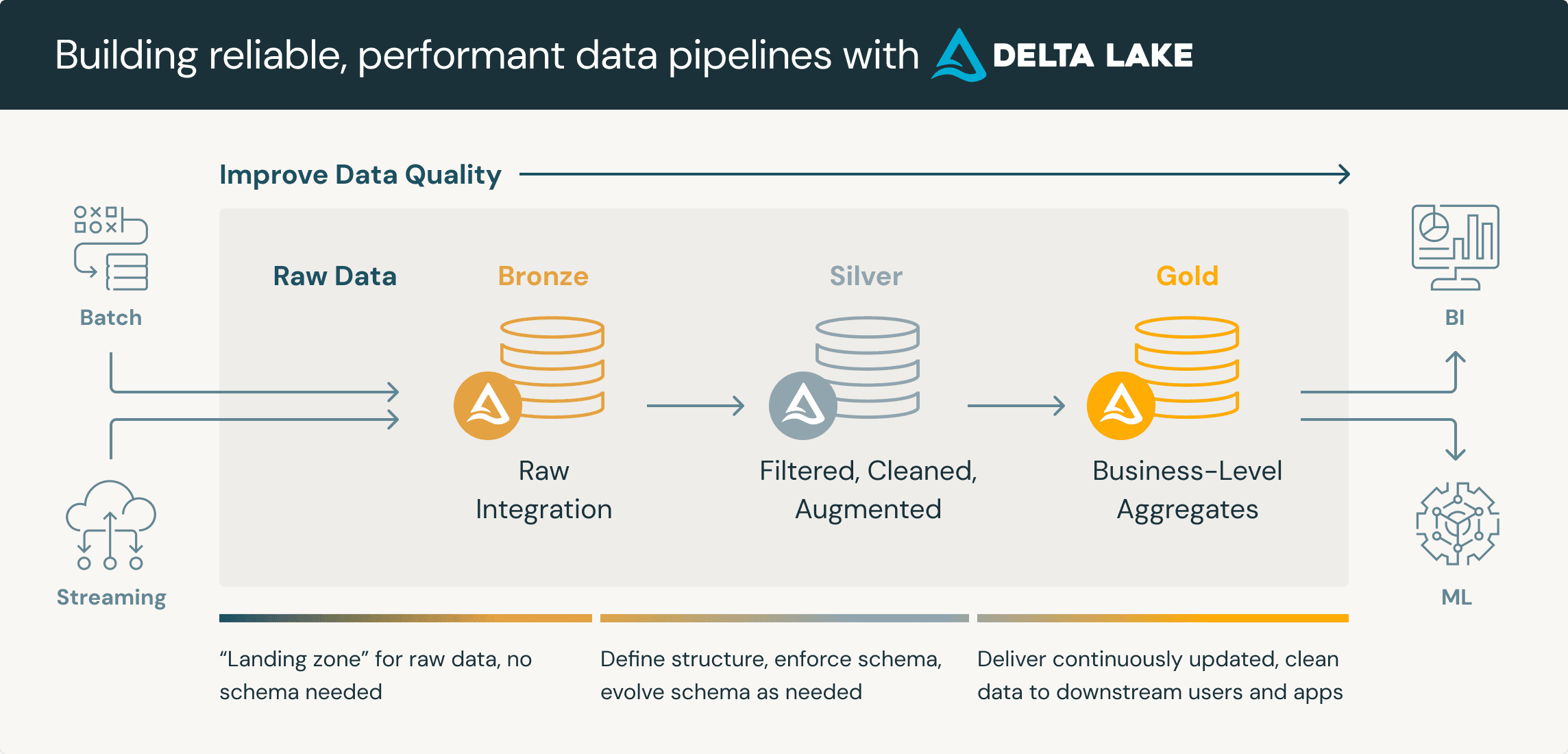
Diagram: Medallion architecture used in Azure Databricks to organise telemetry data into Bronze (raw), Silver (cleansed), and Gold (curated) layers. This layered structure enables reliable analytics and model training.
Environments and Source Control
We utilise a blue-green deployment strategy with dedicated environments (and corresponding Git branches) for development and demo-ready, stable versions. Each environment maintains its own configurations – Event Hubs, Power BI dashboards, and Event Grid resources – while sharing a unified Databricks workspace. Notebooks and infrastructure-as-code (Bicep templates) are organised per environment folder for isolation and maintainability.
Telemetry Simulation and Hardware Integration
To bridge the gap between concept and real-world data, we simulate vehicle telemetry in two ways:
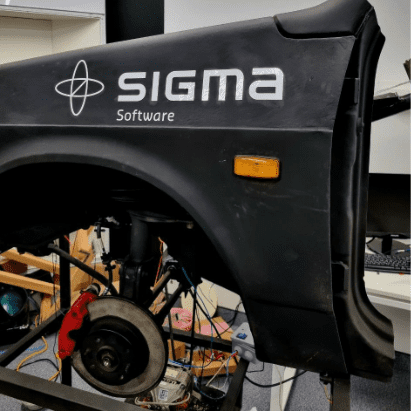
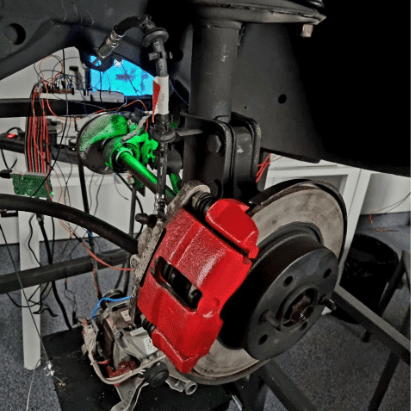
The hardware stand uses Eclipse KUKSA for internal signal management. It supports integration with gaming input via an Arduino Nano, making it a versatile platform for both data generation and live demos.
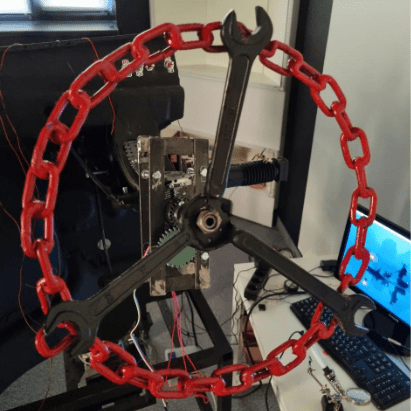
Photos: Hardware stand simulating core automotive functions like steering, braking, and engine operation – used to generate realistic telemetry data for cloud processing and demos
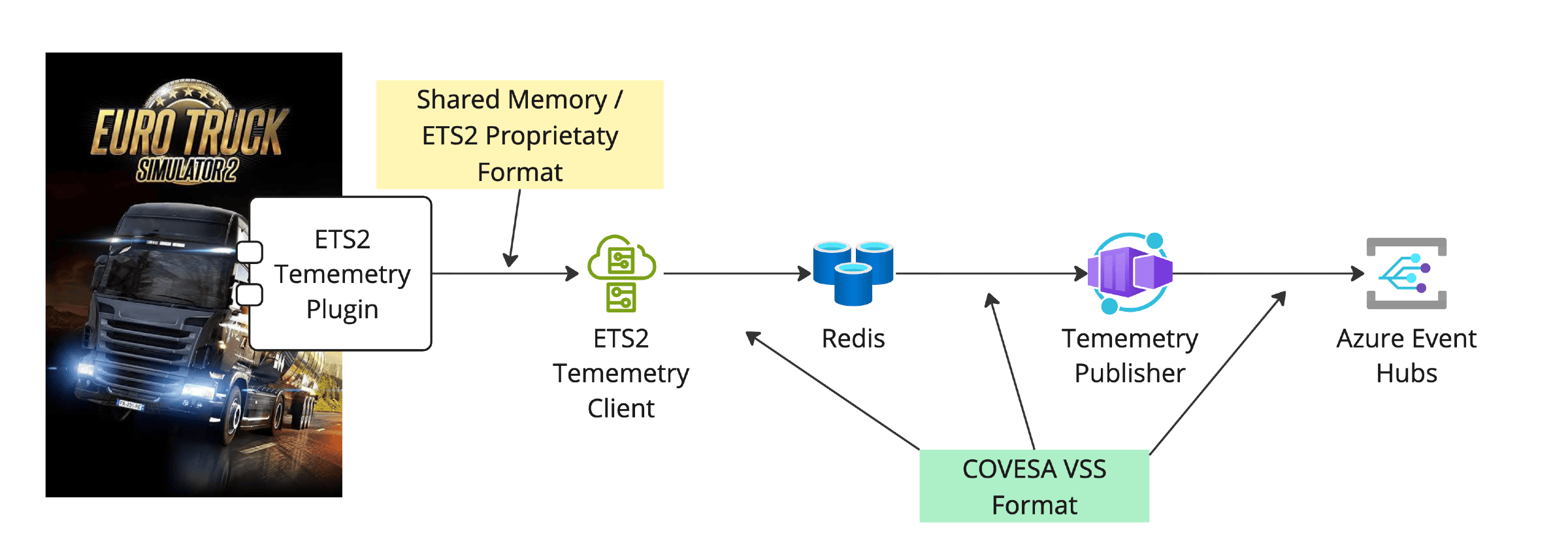
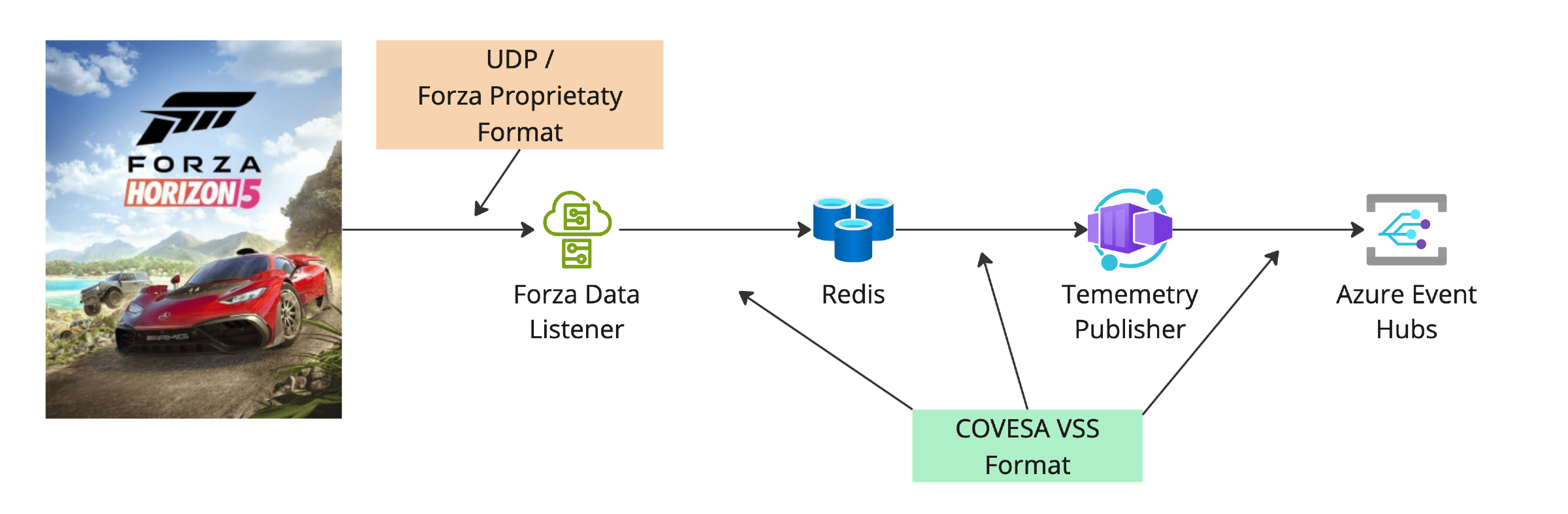
Diagrams: Standardised telemetry data flow from Euro Truck Simulator 2 and Forza Horizon: from in-game data extraction to Redis, through the Telemetry Publisher, and into Azure Event Hubs.
Real-Time Prediction and Visualisation
Once telemetry data reaches the Gold layer, it’s processed by a Prediction Worker, a Databricks job that applies the trained ML model to generate insights such as remaining brake pad lifespan. Results are sent to a Power BI Live Dataset or Databricks App dashboard for immediate visibility. A parallel handler also streams raw telemetry into visual dashboards, enabling a unified view of both raw and predicted signals.
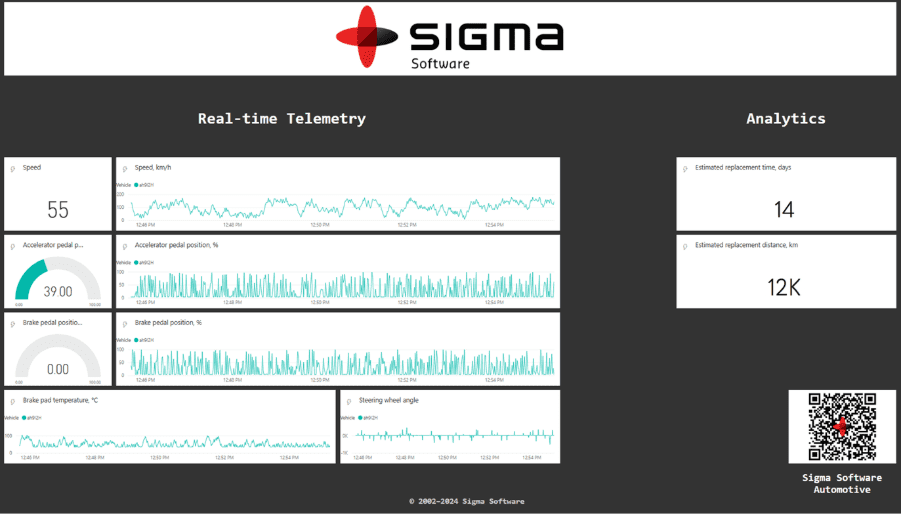
Dashboard: A live dashboard displaying predicted brake pad wear over time. Real-time insights enable fleet operators to schedule proactive maintenance and minimise vehicle downtime.
Throughout the Fleet Predictive Maintenance R&D, we encountered a range of technical challenges across both the cloud and the physical simulation setup. Solving them took a mix of creative thinking and practical engineering to keep the system stable, scalable, and demo-ready.
The R&D phase is not just about building a solution – it also helps us develop reusable patterns and validate architectural decisions.
Simulation Should Be Practical – and Engaging
From the spinning motor to visibly eroding brake pads, our stand wasn’t just functional – it drew people in. A good demo can serve as both a conversation starter and a proof point.
Cloud and Edge Are One Pipeline, Not Two
It’s easy to think of the hardware and cloud as separate systems. But issues like dropped packets reminded us to treat everything from sensor to dashboard as one continuous flow – and to build resilience into both ends.
Visual Impact Drives Stakeholder Buy-In
We found that nothing beats showing data in motion. Watching the system respond in real time, with physical components and live dashboards, was far more persuasive than static charts or technical slides.
Start Simple, Then Scale
Beginning with simulator data (Euro Truck Simulator, Forza) gave us speed and flexibility. The hardware stand bridged the gap toward realism – without waiting on OEM access or legal agreements.
From architecture to execution, several key lessons emerged that can help guide similar automotive cloud projects.
Transitioning from Simulation to Real-World Vehicle Data
With a solid foundation in place, our next step is bridging simulation with reality. We’ll begin integrating anonymised datasets from commercial telematics providers. These offer real-world structure and variability without legal overhead, giving us a critical proving ground before ingesting live vehicle data.
This phased approach ensures we:
Once validated, the platform will begin handling real-time telemetry from fleet partners with minimal architectural changes.
Several near-term improvements are underway to enhance the platform and prepare it for production-grade deployments:
The Fleet Predictive Maintenance R&D project aimed to explore how cloud-native technologies can power connected vehicle analytics – and it succeeded. By creatively combining game-based telemetry, a custom hardware simulation stand, and Microsoft’s SDV reference architecture, we built an end-to-end solution capable of ingesting, processing, and analysing real-time vehicle data – even without a live fleet.
Our architecture, grounded in modular and scalable Azure components, has proven effective for simulating predictive maintenance use cases, such as forecasting brake pad wear. We leveraged AutoML for model training, Databricks for processing, and Power BI (soon to be replaced by Databricks Apps) for real-time insights, ensuring the entire pipeline is both demonstrable and extensible.
Key Takeaways
The automotive industry is entering a new phase, where innovation doesn’t have to start in the vehicle. By decoupling from in-vehicle software and OTA complexities, we’ve created a flexible platform that supports a wide range of value-added services, from predictive maintenance to risk modelling and beyond.
In closing, our journey shows that innovation in connected mobility doesn’t have to wait for access to real vehicles. With the right architecture, simulations, and vision, it’s possible to build meaningful, scalable automotive solutions from the cloud outward.
Most AI assistant deployments start with a question: what can we give this system access to? The more data, the better the answers. That logic is correct – and ...

Biotech executives face a massive data problem. The issue is not gathering information. The issue is making that information useful. Clinical trials slow down b...

Healthcare leaders need to switch from billing for services to getting paid for patient health. Artificial intelligence offers specific tools to manage this shi...